Copyright ©
by Anatoli Bedritsky, 1984-2024
Author: Anatoli Bedritsky
Email: anatoli_bedritsky@yahoo.com
3.10.2024
Abstract
In the article is defined initial particles of matter - mats. The ether and all matter of the Universe consists of them. The
essence and properties of ether are defined.
Chapter 1. Mats
and air
Chapter 1. Mats
and air
1. Mats – Initial Particles of Matter
Objectively we see and we realize that in the space of Universe
surrounding us there are various matter having different density, what is
possible if matter is not continuous, but consists of particles between which
there is an emptiness. Space of infinite, because
it is impossible to present the end of this space without having asked a
question - what is behind it.
The infinite space with matter is non-uniform, the
matter has different density, and different
parts of matter have motion relative to each other.
The Universe is limited to space in which the person can observe or
scientifically register matter. The space in which matter is observed or
registered represents the Universe. But we do not know whether our Universe is
infinite in infinite space, or if there is a set of the Universes divided by
emptines, in which is invisible ether.
The
simplest condition of matter of the Universe is if this matter consists of
identical particles of eternal matter, of which essence - cannot be learned. These initial particles of matter are
called - mats. New mats do not
appear and do not disappear. Thus, the Universe consists of emptiness (nothing) and of
mats (something).
Mats
are eternal matter in the form of particles, they have absolute density and
hardness with which they are indivisible and are
not deformed. It is logical to believe that mats absolutely integral, i.e. mats do not consist of any particles. Mats have identical mass and have the form of ideal balls, i.e.
they are ideally smooth. The essence of mats cannot be defined. The modern
science visually did not reveal separate
mats, as they are the smallest particles, for detection of which are is no have
scientific tools yet.
In fig. 1 is a ball, which represents a mat.
2. Inertial Motion of Mats. Ether and its Properties
Mats
are in emptiness of infinite space, where they have inertial motion with
constant velocity before collisions. At
collision of one mat with other mat these mats slide one on other and push away
each other, leaving each from other. At pushing the
mats from of each other they change the direction and the velocity of motion. After
collision the motion of mats continues rectilinearly by inertia. But, because in space there is multitude of mats, then the rectilinear
motion of a mat in given direction continues until this mat colides with another
mat. At collision of one mat with another mat the
mats slide one on another, changing the velocity and the direction of their
motion. The infinite set of mats, moving through emptines
on different sides, colliding with each other, form ether. The ether cannot represent
any rarefied continuous matter without emptiness, because
such matter would be absolutely dense as mats of ether.
Space ether in intergalactic space has equal strength of
impulsation of multitude of mats of ether in different directions. Such ether
is called uniform ether. Because all mats of space ether have motion
relative to each other and all space bodies have motion, then there is no
motionless object concerning which it is possible to define the nature of the
movement of mats of ether and space bodies. But the
nature of motion of mats of ether, elementary particles and space bodies
can be conditionally defined relatively uniform ether of interstellar space.
The vector sum of impulses of mats of the ether, which pass through a
unit of area of a conditional plane in one side in a unit of time, is called
the strength of impulsation of ether. in each direction in given point. The strength
of impulsation of ether in given direction is defined:
![]()
where ![]() – are the vectors of impulses of separate
mats, which acts at present time on a conditional plane
perpendicularly on the one hand in time
– are the vectors of impulses of separate
mats, which acts at present time on a conditional plane
perpendicularly on the one hand in time ![]() ,
, ![]() - is the area of the
conditional plane.
- is the area of the
conditional plane.
The impulse of separate mats of ether is
defined:
![]() ,
,
where ![]() velocity of a mat at
present time,
velocity of a mat at
present time, ![]() mass of mat (identical at all mats).
mass of mat (identical at all mats).
3. Collision of
Mats of Ether
Mats of ether
move through emptiness of space inertially, rectilinearly, with constant velocity, independently from of each other.
But at collisions with each other they change the direction of motion. Because mats at motion on ether move through emptiness, and at
collisions they are not deformed, the nature of collision of mats differs from
collision of bodies of atomic matter.
At collisions the mats collide in one point, and
this point is sliding on both mats. At
this sliding the mats are pushing each on other to
their divergence. If the direction of motion of the center of mass of a given
mat is perpendicular to the plane of other mat, then
such blow of the mat about other mat is called a central impact or a
central collision. But if the point of collision is not on the line of the
direction of motion of the center of mass of a mat, then only a part of impulse
of mat is acting on the point of collision, and such blow of one mat about
other mat is called noncentral impact or noncentral collision.
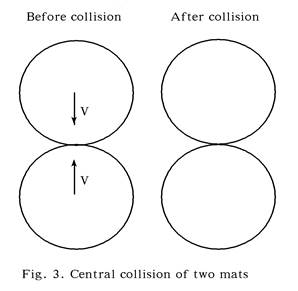
At central collision of two mats, the mats push
away each other, but, because the impulses of mats are identical and opposing,
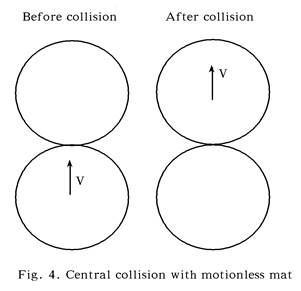
mats will stop their motion in a collision point, because mats absolutely dense and firm. If to consider one mat
conditionally motionless, then at the central collision with other mat, the
motionless mat will increase the velocity of motion, and the mobile mat will
reduce the velocity of motion until their speeds become equal, and they will remain
in contact. These mats will have a half of velocity of moving mat earlier.
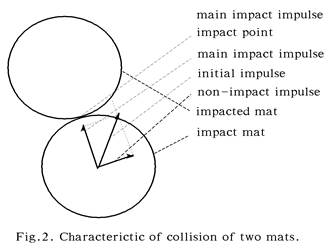
At noncentral collision the mats are pushing each
other, and they slide on each other to their divergence. After collision the
mats can have a new direction of motion. The motion and an impulse of mats are
conditional as that depend on the chosen conditional motionless point.
In fig. 2 is shown the acting of an impulse of one
mat at noncentral collision on other conditionally
motionless mat.
In fig. 3 is shown a central collision of two mats,
which have conditionally identical velocity of motion. In fig. 4 is shown a
central collision of two mats, at which one of mats conditionally
motionless.
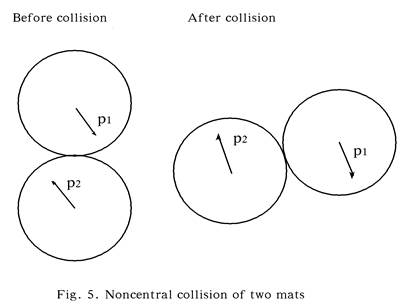
At noncentral collision of mats they change the
direction of motion, but do not change the velocity of motion, as they are
surrounded with emptiness, and they slide one on other without resistance,
pushing each other in the emptiness. At these collisions the mats change the
direction of motion depending on the corner between lines of motion of the mats
before collision. In fig. 5. is shown noncentral collision of two mats of space
ether, where all mats of ether have identical velocity of motion c. The
direction of motion of mats after collision is on the tangent line in the point
of contact of mats after their collision.
Conclusion
1.
Ether consists of identical
particles - mats,
moving through emptiness inertially
in different directions.
2. At
collisions of mats of ether with
each other they change the direction of motion, and do not change the velocity
of motion, as they slide one on other without change of velocity.
3. Mats
have no rotation, because at collision they slide one on other without
resistance, pushing away each other in emptiness.
References
1. Anatoli Bedritsky
”Ether Theory of Construction of Matter of Universe”, Moscow, OOO “Lenand”, 2013, ISBN978-5-9710-0593-3 (in
Russian).
2. Anatoli Bedritsky “Real Theoretical
Physics”, Moscow, OOO “Lenand”, 2018, ISBN978-5-9710-3897-9 (in Russian).
3. Anatoli Bedritsky “New Theoretical
Physics”. Published 1994 by A. Bedritsky in Netanya, Israel. Written in
English. LC Classifications: QC20. B4 1994. Open Library OL936258M. LC Control
Number 95237985